zzk
复习 传感器介绍 传感器ros2 实验 homework 去哪里? cd 要去的文件夹/目录/绝对路径/相对路径 在哪? pwd 有啥? ls 省略/相对路径/绝对路径 带参数的 ls -a 所有文件和文件夹,ls -l 详细情况 sudo权限指令 在普通用户状态下,执行高权限指令 例如:安装新的软件 sudo apt install 软件名字,sudo reboot
切换用户 su 用户名/ sudo bash mv 移动文件夹/重命名 rm 删除指令 带参数的指令:rm -r 删除文件夹, rm -rf程序员删库跑路指令 1.跨越虚拟机/服务器 与物理机/操作机的界限 Pycharm配置参考 2.多样化的插件和 丰富的功能: markdown渲染
3.减少终端的文本编辑操作 常见的终端文本编辑器 vim nano vi 4.可以直接编辑隐藏文件 .gitignore 可以在存储库的根目录中创建 .gitignore 文件,指示 Git 在提交时要忽略哪些文件和目录。 若要与克隆存储库的其他用户共享忽略规则,请将 .gitignore 该文件提交到存储库中。 cd 程序文件夹 git add . git commit -am “描述提交代码的目的” git push
版本管理的本质:
程序文件夹根目录下 .git 目录(隐藏文件夹)
分支/版本
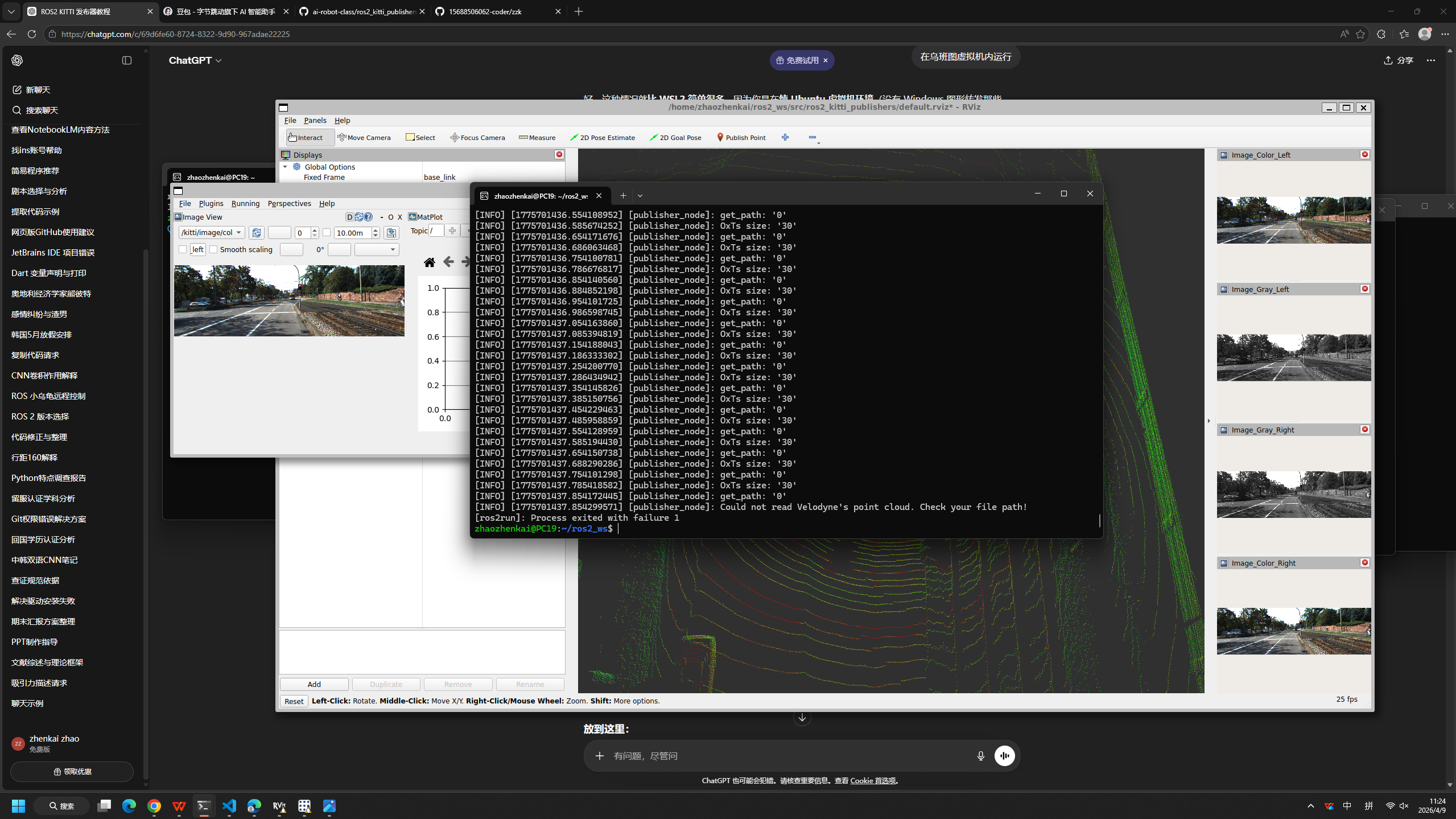
激光雷达:2D,3D
声纳(水中机器人使用)
相机:单目/双目,深度,RGB-D
触觉
imu 惯性测量单元
GPS
融合数据: 1.点云/激光点云 2.IMU + GPS + LiDAR (LIO/LVI-SAM) 无人驾驶 通过发射激光束并测量反射时间来计算距离(ToF)。 2D LiDAR:仅在单一平面扫描,常用于扫地机器人或室内 AGV 的 SLAM(即时定位与地图构建)。 3D LiDAR:多线束(如 16/32/64/128 线)扫描,产生三维空间点云,是无人驾驶感知障碍物、形状、距离的核心。
单目 (Monocular):成本低,但无法直接获得深度信息(需通过算法/深度学习估算)。
双目 (Stereo):模拟人眼,通过左右相机的视差(Disparity)计算深度。
RGB-D / 深度相机:
结构光(如 Kinect V1):发射已知图案,根据畸变计算深度。
ToF(如 Kinect V2):测量光脉冲往返时间。
特点:直接输出带有颜色信息(RGB)和深度信息(Depth)的点云,但有效距离通常较短(5米以内)。
例子:乐视体感相机
MU (惯性测量单元)
组成:通常包含三轴加速度计和三轴陀螺仪。
作用:提供高频的角速度和加速度数据,通过积分推算位姿。
痛点:存在累计误差(漂移),长时间运行会偏离真实位置。
GPS / GNSS
作用:提供全球绝对坐标。
RTK 技术:通过基准站校验,可以将定位精度从米级提升到厘米级。
痛点:更新频率低(通常 1Hz-10Hz),且在隧道、城市森林中信号易丢失。